Tecnologia aberta
que inspira inovação
Conheça o openDecabot e a Arena Decabot,
soluções para aprendizado e competição em robótica.
Sobre nós
Na Decabot, unimos tecnologia aberta e experiência do usuário para criar artefatos acessíveis para entretenimento e educação. Acreditamos que o desenvolvimento de nossos alunos, filhos e de nós mesmos precisa ultrapassar as barreiras econômicas e de acesso, e para isso escolhemos cada componente de nossas soluções abertas para que seja o mais acessível possível a todos os interessados no desenvolvimento de robôs pessoais.
Produtos

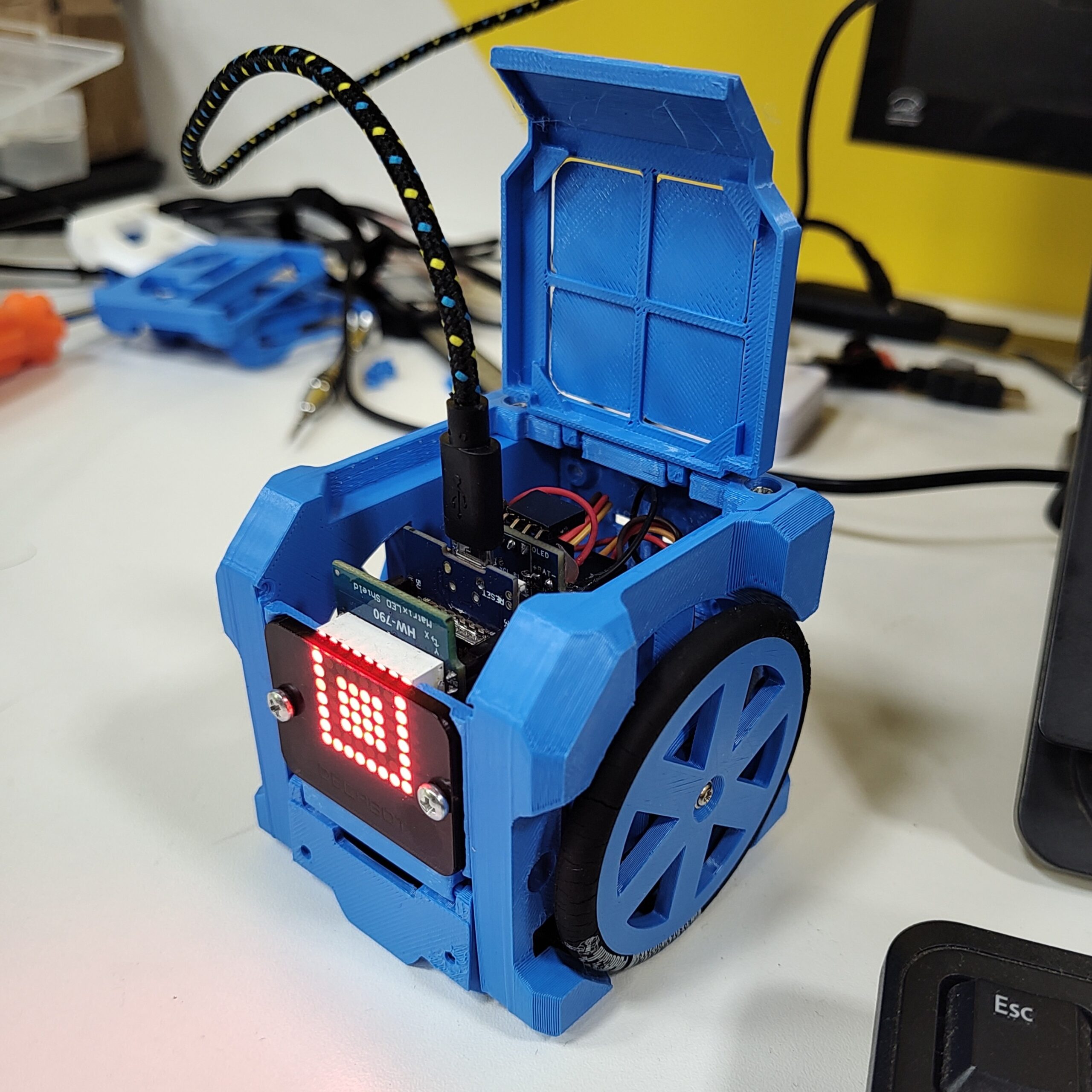
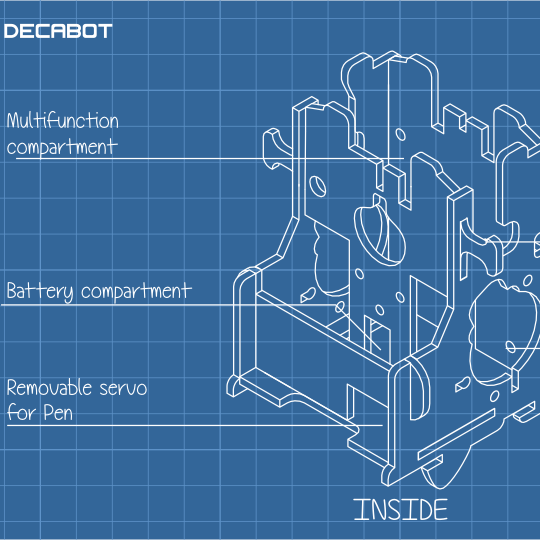
OpenDecabot: plataforma open source para aprendizado prático em robótica.

Arena Decabot: espaço para competições emocionantes de robôs de combate.
Suporte e downloads: acesso fácil a recursos e atualizações para seus robôs.